- Principal investigators
- Staff
-
M.Sc. Andreas Schmidt
- Begin
-
01/04/2014
- End
-
01/11/2017
-
In this project, we apply Reduced Basis Methods to optimal feedback control problems for parametrized control problems, governed by partial differential equations.
A huge variety of technical, biological or economical phenomena can be modeled in terms of partial differential equations. A subsequent question is, whether one is able to influence the dynamical process to obtain a desired behaviour, which is called "control" of the system.This question is answered in the mathematical discipline "control theory". There exists tools that allow the computation of a feedback controller, i.e. a controller that uses the current state to define a control that steers the system to a desired state. One way to do this, is to design a linear quadratic regulator (LQR) feedback control. In order to apply this technique, the differential equation is spatially discretized, which yieds a very high dimensional system of ordinary differential equations. For the feedback control one then has to compute the solution to an equally high dimensional Riccati Equation. Especially in a scenario where the system is parameter dependent and the controller should be computed for lot of different parameters, this strategy is often infeasible for real-time scenarios. Therefore we want to apply special model reduction techniques in order to reduce the dimension of the system and to be able to obtain a controller much faster.
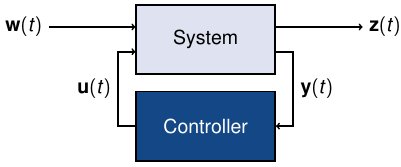
To become more precise, we want to use reduced basis surrogate models for optimal feedback control of parametric time dependent PDEs. As a main class of problems, we consider linear quadratic regulator (LQR) feedback control, i.e. linear PDEs with quadratic cost functional as optimization target. All of these may be subject to parametrization. Additionally, the system may be subject to noise, that the controller needs to deal with. We will devise general RB-LQR schemes for parametric systems. Traditional LQR techniques require the solution of high dimensional Riccati equations and expensive simulation of the system in the observer for each given parameter constellation. These two tasks will be treated with RB surrogate models.
We address optimality, stability and error analysis of the resulting feedback schemes, where the benchmark will be the LQR-controller using the full state. Suboptimality and error of the feedback signal, the controller matrix and the state trajectory will be quantified by a-posteriori error analysis.
As driving application fields we will consider flow problems ranging from linear advection-diffusion-reactor over Stokes to flow in porous media such as appearing in subsurface flow problems for CO2-sequestration or fuel-cell-design. - Funded by
-
This project is funded by the German Research Foundation (DFG) within the Cluster of Excellence in Simulation Teasdchnology (EXC 310/1) at the University of Stuttgart and the Baden-Württemberg Stiftung gGmbH.